Works
Write-ups of what I’ve built. Where it applies, each result is measured by an independent verifier on held-out data it never saw — and the dead ends are kept on the record next to the wins.
 LenaLabSun Jun 21 2026 00:00:00 GMT+0000 (Coordinated Universal Time)
LenaLabSun Jun 21 2026 00:00:00 GMT+0000 (Coordinated Universal Time)LenaLab: What an AI Agent Built — and How We Know It's Real
Start here. An AI agent wrote the computer-vision algorithms; a separate, deterministic, AI-free grader scored every one on data the agent never saw. Over three weeks that loop ran across seven different problems — dashcam trajectories, km-scale SLAM, six-camera BEV, 3D occupancy, and a warehouse floor map from 19 ceiling cameras. What it built, how it trained, where it broke, and why the numbers hold up.
overviewcomputer-visionverification CompositeThu Jun 11 2026 00:00:00 GMT+0000 (Coordinated Universal Time)
CompositeThu Jun 11 2026 00:00:00 GMT+0000 (Coordinated Universal Time)When Simplex Met Images: Reading a License Plate From 31 Shaky Frames
Putting the 60-year-old Nelder–Mead (Simplex) optimizer to work on image registration through a Gaussian scale-space — fusing 31 shaky dashcam frames into one multi-frame super-resolution result that reads a license plate no single frame can. With an SSD-vs-NCC quantitative comparison over 50 samples.
image-registrationsuper-resolutionclassical-cvoptimization LenaLab✓ 1Sun Jun 21 2026 00:00:00 GMT+0000 (Coordinated Universal Time)
LenaLab✓ 1Sun Jun 21 2026 00:00:00 GMT+0000 (Coordinated Universal Time)Off the Road: an AI Agent Maps a Warehouse Floor From 19 Cameras
Nineteen ceiling cameras → one privacy-preserving top-down map of where every person, forklift, and robot is. An AI agent's from-scratch model beat the IPM baseline I wrote ~2× on held-out time; a production model (ImageNet-pretrained + 3× data) then reaches 0.442 IoU. And the honest harder finding: one model for every warehouse doesn't transfer (~0.05 on an unseen space) — each space is its own camera-rig distribution, so per-space adaptation is the deployable unit.
occupancymulti-camerasmart-spaceipmperception LenaLab✓ 1✗ 1Fri Jun 19 2026 00:00:00 GMT+0000 (Coordinated Universal Time)
LenaLab✓ 1✗ 1Fri Jun 19 2026 00:00:00 GMT+0000 (Coordinated Universal Time)Six Car Cameras → a Top-Down Map: BEV Perception, Verified
A second problem class for LenaLab — multi-camera Bird's-Eye-View perception on nuScenes. Run three times, a from-scratch agent cleared the held-out bar only 2/3 (0.085 ± 0.034): capable but not robust. The diagnostic pinned the variance on the agent's design latitude, not the task; a scaffold that locks the geometry/augmentation and lets it author only the network collapsed the variance 7.3× to a stable 3/3 (0.136). The full cycle — build, find it's non-robust, diagnose, scaffold, validate.
bev-perceptionmulti-cameranuscenesoccupancyautonomous-driving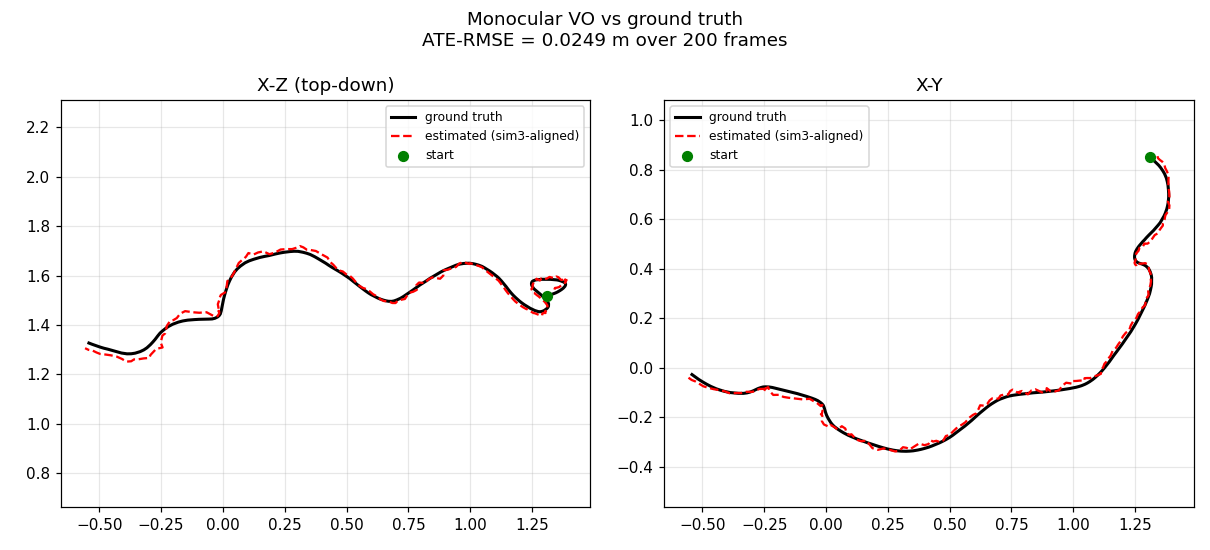 LenaLab✓ 15✗ 8Fri Jun 19 2026 00:00:00 GMT+0000 (Coordinated Universal Time)
LenaLab✓ 15✗ 8Fri Jun 19 2026 00:00:00 GMT+0000 (Coordinated Universal Time)An Agent in a Lab: A Chronicle of LenaLab
An autonomous AI agent writes visual-odometry and SLAM algorithms from scratch — each graded by an independent verifier on held-out data it never saw. A 0.033 m RGB-D win on an unseen scene, an honest 412 m SLAM failure, and the sim-to-real wall, across 23 trials.
visual-odometryrgb-dslamkittiviolearned-vo LenaLab✓ 1✗ 1Fri Jun 19 2026 00:00:00 GMT+0000 (Coordinated Universal Time)
LenaLab✓ 1✗ 1Fri Jun 19 2026 00:00:00 GMT+0000 (Coordinated Universal Time)Into 3D: Camera-to-Voxel Occupancy, and a Finding That Replicated
LenaLab's sixth domain, and its first in 3D — camera→3D-occupancy on nuScenes. A from-scratch agent authored a Lift-Splat-to-3D network; run three times it cleared the held-out bar only 2/3 (0.086 ± 0.024). The BEV finding replicated: the variance is the agent's design latitude, and a scaffold collapses it ~6× to a stable 3/3. Honest nuance — in 3D the scaffold buys reliability, not a higher peak.
occupancy3d-perceptionmulti-cameranuscenesautonomous-driving